The original embodiment of PlayRobots started as a means to develop and distribute a set of low cost robotic development platforms to enable users to learn about robotics. The project described here is the result of the first and second development intended for this purpose.
{kind=link}
Hardware:
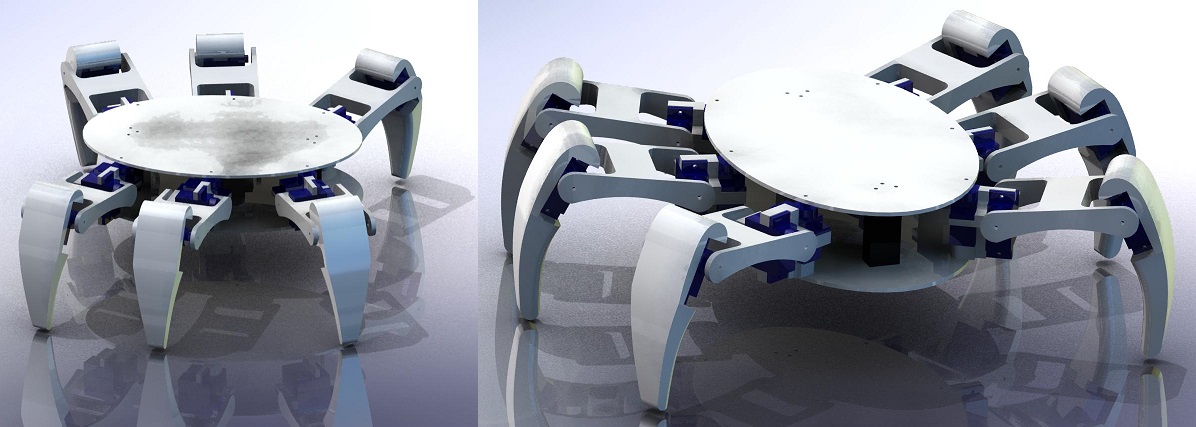
The design of the hex-pod robot was inspired by traditional designs. Each leg has 3 degrees of freedom to allow complete freedom of movement. The finalized design also has an abdominal section that has two degrees of freedom to allow it to manipulate its body as well as a one (or two or three) degree of freedom head that provides additional section movement and a manipulator.
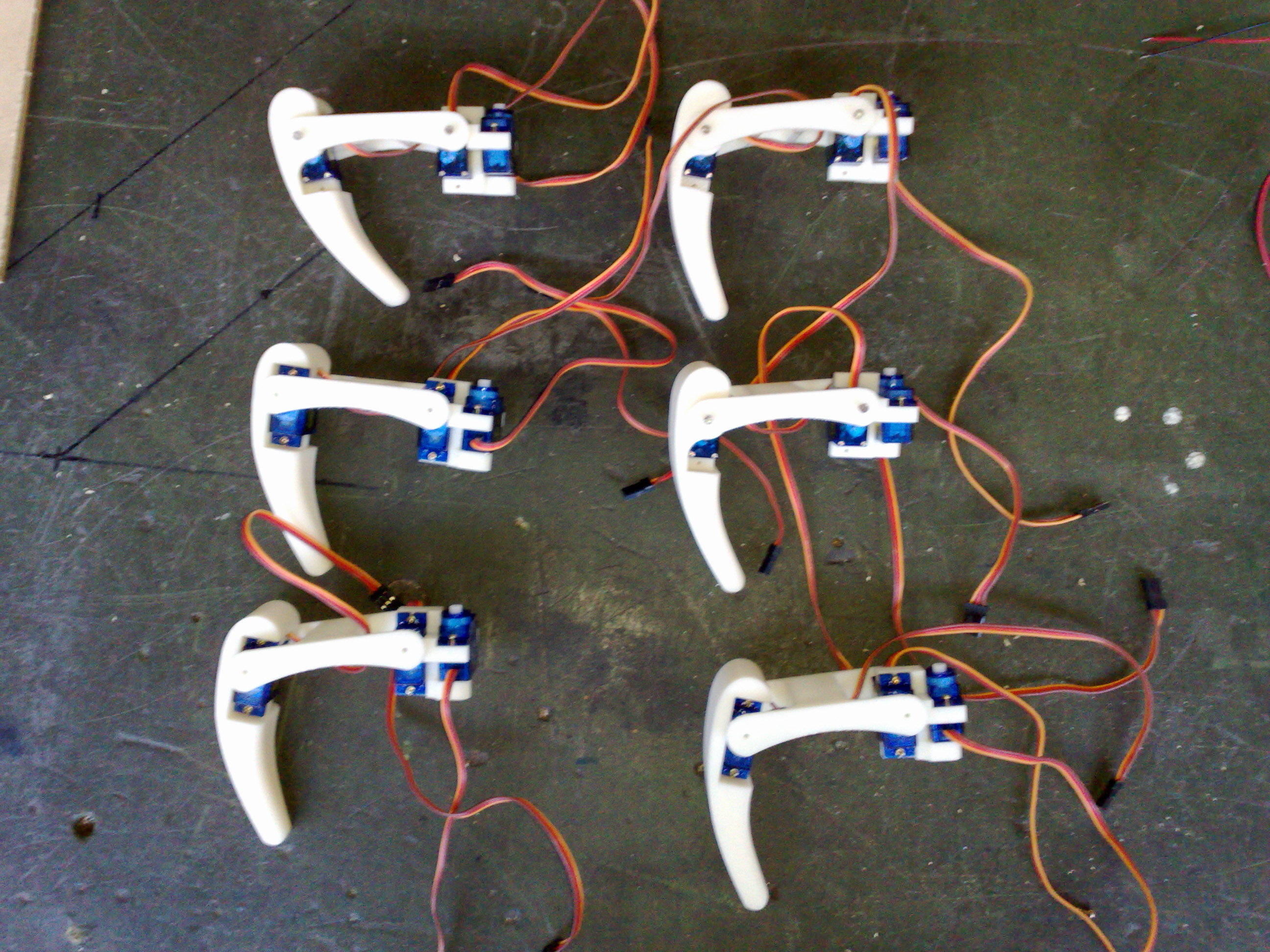
The original design as shown in the above image used Towerpro micro 2g servos which worked well to demonstrate the concept of the robot and implement a single leg movement walking gait like that of a spider. However, the 2g servos lacked sufficient strength to implement a dual-tripod walking gait and be able to support the weight of the robot. In the finalised design the second axis servo motors were replaced with eMax ES3103E micro servos which considerably improved the performance of the robot whilst keeping it affordable.

STL models that can be used to build your own hex-pod are available in the downloads section. The central section of the leg is not yet available as we are waiting for proper testing.
To control the HexPod we use two circuit boards, the first is a Servo Controller designed by PlayRobots which utilises a PIC microcontroller to generate the necessary signals for control servo-motors used in the robot (24 channels, 18 for the legs + 2 for the head + 2 for the mandibles with 2 left over).